國廠祥儀科技寶智慧手臂 1/3:
機構設計篇
Nov. 5, 2022
 [2][3]
[2][3]當國產祥儀塑鋼積木手臂添加了威盛(VIA)的 Pixetto(文後皆以 8787 稱之)AI 視覺感測器(vision sensor)(文後皆以智慧手臂稱之)會產生什麼綜效?本系列文章將從機構與機電整合設計兩面向逐一解說這其中的秘辛。
套件學習法
廠商都幫忙把機構、機電整合、電控程式、教材包成懶人包了,剩下的就只是按圖施工(腦袋空空)了嗎?
一般而言,知識、技能的學習約莫有兩種方式:由上而下(top down)和由下而上(bottom up),如圖 1 所示。其中,因前者已經有了套件典範(paradigm),所以我們比較容易將之拆解(decompose)而學習,但會因結果已知而限制了創意的擴散思考設計。然而,從基礎的各個知識點按部就班依序學習完畢後才將之整合(integrate)而的設計亦是另有一番風景。不過,見樹不見林的盲點容易導致學完新的知識就忘了舊的。

智慧手臂教學採由上而下方式將大部頭的知識點逐一拆解至容易理解的各個小塊知識基元來還原作品設計的各階段歷程,此套件學習法如圖 2 所示。我們期待學員們能以設計師(designer)的視野去綜覽 why、how、…等等緊密的設計思維來欣賞這隻智慧手臂的創造歷程,並經由親手仿作來體驗與學習。
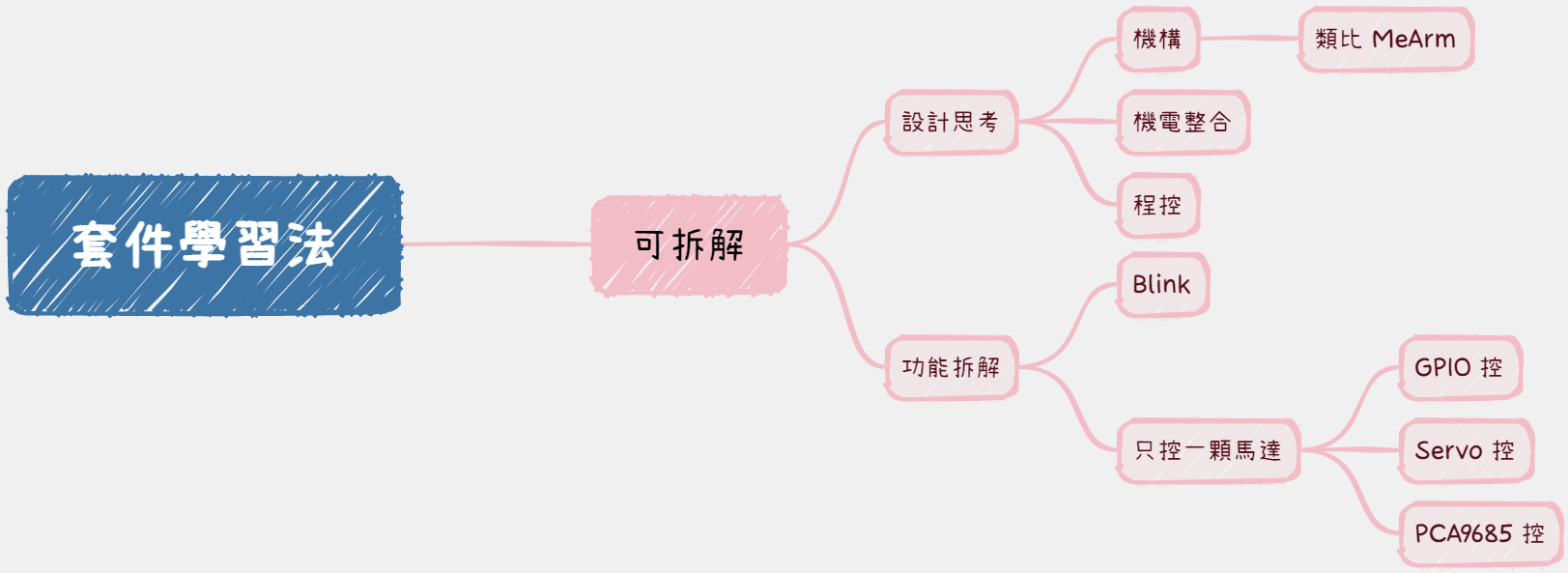
圖 2:套件學習法
仿生
舉起您的手臂活動活動,覺察一下:圖 3 的 1 處關節(joint)可以 360 度運動,2、3 處只能在限定角度下運動,而 4 處可做抓取。

圖 3:人體手臂四關節
圖 4 的智慧手臂設計即是模仿人類的手臂運動,在 1~4 的關節點放上可以帶動的四顆伺服(servo)馬達(SG90 和 MG995)而使得它有四軸(axies)可以在空間中自由的運動。其中,伺服馬達 1 可 0~180 度左右轉動,伺服馬達 2、3 負責控制大、小手臂的上下運動,伺服馬達 4 則控制抓子的開合抓取。

圖 4:智慧手臂四軸
參考設計:MeArm
筆者在約莫數年前即接觸了著名的機器手臂開源(open source)專案 MeArm(https://reurl.cc/oZ1ArV),它是由底盤、大手臂、小手臂和夾子四段所組成(https://reurl.cc/QWLGNZ),
模仿人手動作的秘密在於四個馬達,前方馬達控制爪子的開合;左左兩個馬達用來控制手臂前後伸展及上下移動;安置於下方的馬達是讓整組機身左右旋轉。 ~https://reurl.cc/gQ212N
請讀者們自行比較智慧手臂和它運動方式的異同之處。
機構組裝
根據祥儀提供的第一手組裝指引,我們將之轉檔成圖 5 的影片供讀者們參考。我們強烈建議讀者們根據圖 4 所標示的軸編號,依照數字順序組裝時,每裝妥一軸即輕輕(太大力轉動會使伺服馬達齒輪損壞)轉動觀察它們是如何動作的─對比於人的手臂和 MeArm 設計的異同點為何?
圖 5:智慧手臂組裝
開光:智慧視覺感測器(smart vision sensor)
如圖 6 所示的 demo 影片,智慧手臂使用了 8787 內建的顏色偵測(color detection) AI 模型,並實現了有色物件自動追蹤的示例。機電整合及電控程式的分析將以後文詳述之。
關於 8787 一系列的介紹文章,可以參考筆者所著的「假 a 真 i(https://reurl.cc/28ZV5a)」專網。
圖 6:有色物件自動追蹤手臂
- 六種授權條款。
- 感謝祥儀提供智慧手臂第一手相關文件。
- 感謝羅傑史丹兒童程式教育學院(https://reurl.cc/nZOyRD)提供智慧手臂借測與學生體驗。
沒有留言:
張貼留言